

這一種文章在網路上比比皆是,尤其是在大陸網站哩,到處都是抄來抄去,
轉貼來,轉貼去的。反正也看不出來到底誰是原作者,而且也好像是貼了交差而已。
也不管後續應用如何。尤其我最近有空也看了 STM32 的 USB 介面說明。
也都沒有更進一步說明,所以我想再補充一點說明,下回有機會我就會整理
說明關於 STM32 中關於 USB 系統介面功能,這一部分如果你之前都完全沒有USB
概念或是相關系統經驗的話,可能也很難上手的。可能就跟這篇 CAN Bus 的情形
一樣的。所以我就會用實際系統應用的觀點來補充說明一下吧。
所謂的 CAN Bus (Controller Area Network) ,其實就是用來連結許多控制器之間的一種
通訊介面,這樣子的文字描述,大家都會講,也都看得懂,但實際他的重點是甚麼?
他跟一般所謂的 SPI/I2C/UART 或 RS232/RS485 等有甚麼不一樣之處呢?
其實重點就是在於他這一種通訊界面是有所謂的"仲裁機制" (Arbitration)的。
這一點大家有時真的很難體會,這一篇文章我會用實例證明給大家看的:
為什麼要有仲裁機制?因為既然要成為控制器之間連結的匯流排,就得要能很輕易
的處理訊號衝突(打架)的問題。因為你真的不知道在這些匯流排上還會有誰會
突然插進來搶頻寬的。而且其他的控制器到底是怎麼完善它的系統應用內容的呢?
這個如果要你用一般的 UART 來寫的話,可能大家就得要先坐下來,開一大堆
協調會議,訂出嚴謹的通訊協定(Protocol),那還得了,萬一又是不同產品性質,
或不同國家、不同團隊等,那怎麼辦?這一點你就得不得不欽佩一下 BOSCH 在
車用電子系統的遠見了,因為在車用電子系統裡,一定會碰這一種系統應用問題,
引擎控制器需要車速訊號,但可能ABS 控制器也需要同樣的資訊,而彼此之間也
需要連結通訊的交換系統資訊。但不可能大家都在那邊為了通訊介面在那邊每天
開會討論吧。而且在車輛上的所使用的控制系統也不可能只有你一家獨家啊。
那萬一也要接別人的東西時,要怎麼辦?接下來我就用實例演示給大家看一下。
不過首先要先交代一下在 STM32 中CAN Bus 操作模式說明:
這應該也不光只是 STM32 控制器裡有而已,而在一般有CAN Bus 的MCU中,應該
都是一樣的,我說過了:CAN Bus 的矽智財(IP) 是屬於BOSCH 的,所以大家所使用
的設計方式應該都是一樣的。他們為了大家在MCU 上驗證CAN Bus 功能,他有提供了
幾個使用模式:Silent Mode, Loopback Mode 等模式,就是大家在網路上看到的:

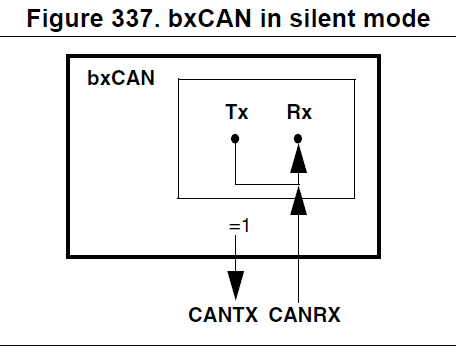
因為CAN Bus 是一種有主從架構的互動型通訊介面,它的存在就是為了控制器之間的
通訊連結,如果沒有其他控制器存在的話,這個東西就沒啥系統應用價值了。
但搞MCU 控制器的,為了大家學習驗證方便,他就提供了這幾種算是測試驗證模式
給大家玩玩,不用第二顆MCU 的 CAN Bus 來交代這件事。結果有很多MCU 的入門書,
或網站說明也都只交代到這裡而已。就沒有下文了,為什麼?因為他們可能只是
賣MCU 而已,至於系統應用的問題,就不歸他們了。
當然有些系統應用他們也可能不懂吧。
所以所提供的範例程式如下:

但萬一我想實際用 Normal mode 時會碰到甚麼問題呢?
-----
匯流排上看到的東西,因為發出去的封包,沒有收到其他CAN Bus ACK 訊號,CAN
Bus 就會一直不斷的發出封包。只要有其他一顆CAN Bus 的控制器存在就正常了。
----
所以從這個例子大家就有了CAN Bus 系統基本應用有點感覺了吧。
接下來我們就來看在實際上CAN Bus 在整合許多Controller Area Network 的情形:

上圖中,就代表著有三組不同的 CAN Bus 系統連結在一起工作之情形,有些是我自己的
控制系統,有的卻是別人的系統,當然我們也不清楚別人的系統東西。但因為 CAN Bus
是大家都要掛在一起工作的,


大家也都會查得到,也看得懂的。但實際是甚麼?也不一定可以體會得到。
這樣的東西會有甚麼問題?那就是有些控制系統可能會隨時掛上此一匯流排,
加入整個系統之中,我指的是:火線上線。這是有可能的。因為在車用系統中,
每一套系統不一定會同時上線,因為每個系統初始化過程的長度與時間不一。
所以系統就得要容忍這種事情發生,那怎麼辦?那就有所謂的仲裁機制了:
所謂仲裁 (Arbitration)簡單來說:

在匯流排上,ID 小的是有比較高的仲裁取得Bus 使用權的。當然啊,我們自己在開發
相關系統應用時,也不會笨到把自己的ID 宣告成比較低(比較高的仲裁權)的控制器。
因為比較高的仲裁權的控制器的系統能力與責任是比較大的。不要搞死自己吧。
尤其是搞一般設備的。
這是一個簡單的技術說明,接下來就實際演示一下CAN Bus 在複雜控制器系統中
如何簡單的建立 Controller Area Network :
在影片中:我們一共有三套CAN Bus 系統,有兩套是我自己的,有一套是別人的,
這一套是搞車用一家英國很有名的公司,RaceLogic 公司,有很多車輛測試都是採用
這家公司的儀器設備,他們的測試數據是世界車界所公認的。當然啊~我們的 CAN Bus
一旦要跟這一種國際知名公司的系統掛在一起時,會不會出現問題啊?這個就是
CAN Bus 厲害的地方了,你不用懂人家的系統內部,也不用知會他們,你就可以隨時
整合他們的東西到你所需要的車用系統中了。影片中:ID 0x401/0x421/0x441。
是RaceLogic 他們的系統,我的有一個是 0x7F1 。然後我另一個 0x7F0 是後來上電
加進來的。所以大家可以看到:幾乎無縫接軌的將我的系統與國外系統在CAN Bus
連接中整合在一起了。
這一種觀念有沒有像我們現在所謂的 Open Source 共享的觀念?這樣的東西,是早在
1992 年,三十年前就形成的。你在想想:如果要你用UART 或其他連接介面。如何
簡單又快速地做到呢?
這樣的東西你大概就應該有點概念了吧。透過CAN Bus ,在許多車用應用系統中
我們就不用甚麼東西就得要自己搞得要死,別人有現成的東西你就可以很容易的
整合進來用了。所以我們才可以看到真正整體車用電子應用系統如何蓬勃的
建立發展起來,這個 CAN Bus 在系統應用上,真的扮演著一個重要的角色。
當然啊,如果你有經驗,也懂得如何使用的話。
以上就是一個很簡單的補充說明與演示。
謝謝各位的觀看,下回見。
沒有留言:
張貼留言